课设
操作系统
Typora
弹性布局
pat考试
注释
硬件架构
PDF合并与拆分
程序员人生
GPT-4
责任链模式
Scratch等级考试四级
3D实例分割
移动应用开发
自动装配原理之Starter
SpaceEngineer
运维开发
cron
参数调优
Java注释
深度估计
2024/4/21 2:26:53![单目3D目标检测[基于深度辅助篇]](https://img-blog.csdnimg.cn/d525c0bc93284695aa8c78cf1e9e521a.png)
单目3D目标检测[基于深度辅助篇]
基于深度辅助的方法
1. Pseudo-LiDAR
Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving康奈尔大学https://zhuanlan.zhihu.com/p/52803631 首先利用DRON或PSMNET从单目 (Monocular)或双目 (Stereo)图像获取对应的…

【论文简述】Learning Depth Estimation for Transparent and Mirror Surfaces(ICCV 2023)
一、论文简述
1. 第一作者:Alex Costanzino
2. 发表年份:2023
3. 发表期刊:ICCV
4. 关键词:深度感知、立体匹配、深度学习、分割、透明物体、镜子
5. 探索动机:透明或镜面(ToM)制成的材料,从建筑物的玻…

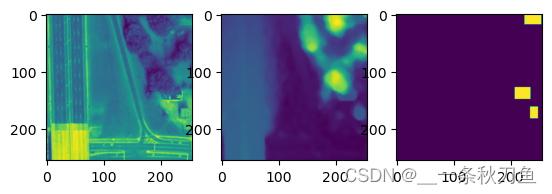
使用ZoeDepth生成深度估计图
目前单目深度估计分为两个派系,metric depth estimation(度量深度估计,也称绝对深度估计)和relative depth estimation(相对深度估计)。 ZoeDepth是 第一个结合相对和绝对深度的多模态单目深度估计网络。本博文仅记录使用ZoeDepth生成深度估计图的过程&a…
【记录】USSOCOM Urban3D 数据集读取与处理
Urban3D数据集内容简介
Urban3D数据集图像为正摄RGB影像,分辨率为50cm。 从SpaceNet上使用aws下载数据,文件夹结构为:
|- 01-Provisional_Train|- GT|- GT中包含GTC,GTI,GTL.tif文件,GTL为ground truth b…
机器学习笔记 - 3D对象检测技术路线调研(未完)
一、3D对象检测简述 3D对象检测是计算机视觉中的一项任务,其目标是根据对象的形状、位置和方向在 3D 环境中识别和定位对象。它涉及检测物体的存在并实时确定它们在 3D 空间中的位置。这项任务对于自动驾驶汽车、机器人和增强现实等应用至关重要。
1、基本流程 给定…
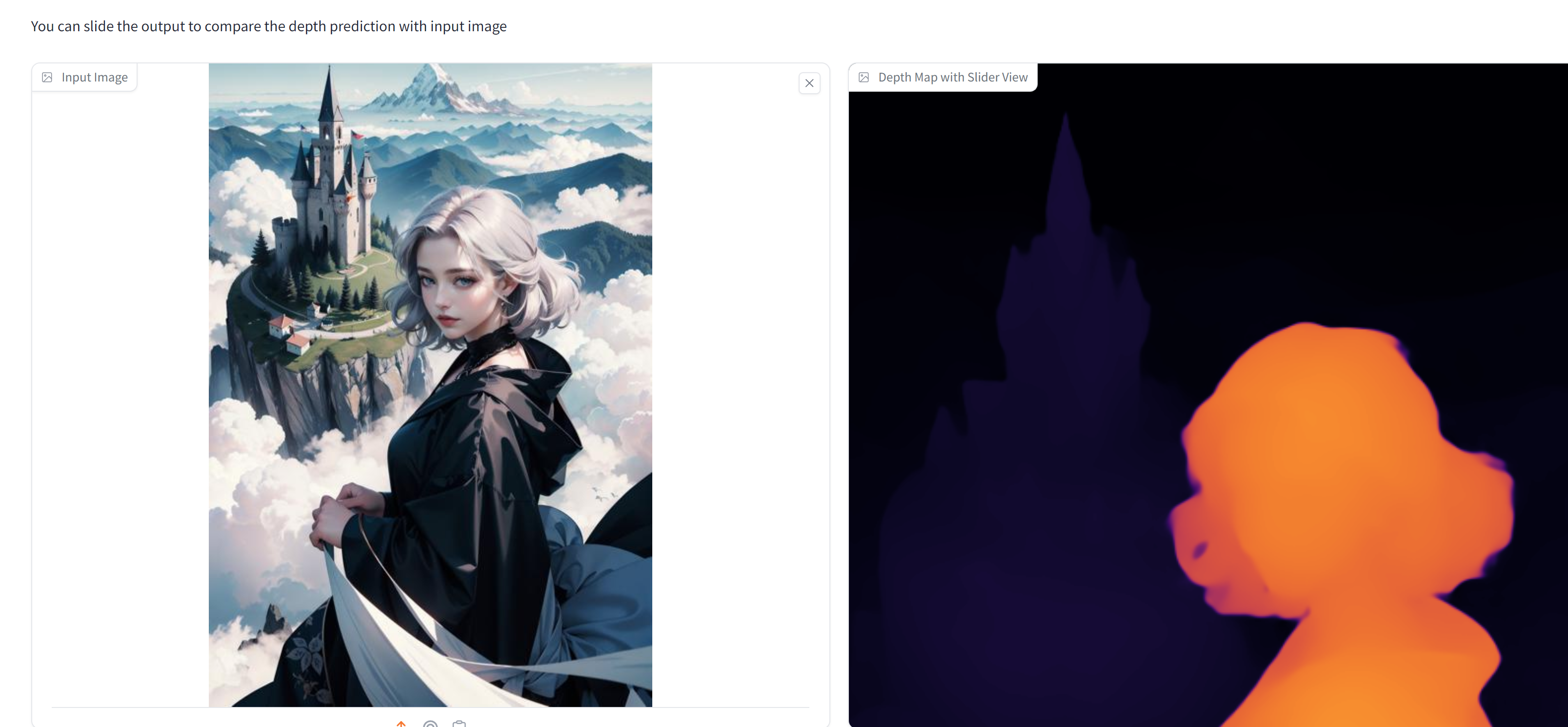
【深度学习】深度估计,Depth Anything Unleashing the Power of Large-Scale Unlabeled Data
论文标题:Depth Anything Unleashing the Power of Large-Scale Unlabeled Data 论文地址:https://arxiv.org/pdf/2401.10891.pdf 项目主页:https://depth-anything.github.io/ 演示地址:https://huggingface.co/spaces/LiheYoung…
CV计算机视觉每日开源代码Paper with code速览-2023.11.14
点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【基础网络架构:Transformer】Aggregate, Decompose, and Fine-Tune: A Simple Yet Effective Factor-Tuning Method for Vision…

Monodepth2和Lite-Mono准备数据集
以KITTI为例下载解压后放在/home/lwd/tmp/2011_09_26 cd /home/lwd/tmp/2011_09_26 ls输出 2011_09_26_drive_0001_sync 2011_09_26_drive_0002_sync 2011_09_26_drive_0005_sync python txt.py txt.py
import os, sysalos.listdir(.)
al.sort()
fopen(train.txt, w)
for a in…
Talk | 牛津大学博士后研究员边佳旺:SC-DepthV3-动态场景中的自监督单目深度估计
本期为TechBeat人工智能社区第550期线上Talk。 北京时间11月23日(周四)20:00,牛津大学博士后研究员—边佳旺的Talk已准时在TechBeat人工智能社区开播! 他与大家分享的主题是: “SC-DepthV3:动态场景中的自监督单目深度估计”,介绍…
![[Mono Depth/3DOD]单目3D检测基础](https://img-blog.csdnimg.cn/162a517ac7514ba88941c1f985230b50.png#pic_center)
[Mono Depth/3DOD]单目3D检测基础
1.数据增强
图像放缩和裁剪后,相机内参要做相应变化
import random
def random_scale(image, calib, scale_range(0.8, 1.2)):scale random.uniform(*scale_range)width, height image.sizeimage image.resize((int(width * scale), int(height * scale)))cali…

Bidirectional Attention Network
欢迎访问我的博客首页。 BANet1. Sub-Pixel Convolutional2. BANet 网络2.1 全局上下文聚合 D2S modules2.2 双向注意力模型3. 总结4. 参考这篇文章来自华为在加拿大的诺亚方舟实验室。
1. Sub-Pixel Convolutional Sub-Pixel Convolutional 由推特 2016 年提出,用…

Mark 一些有意思的深度学习方向
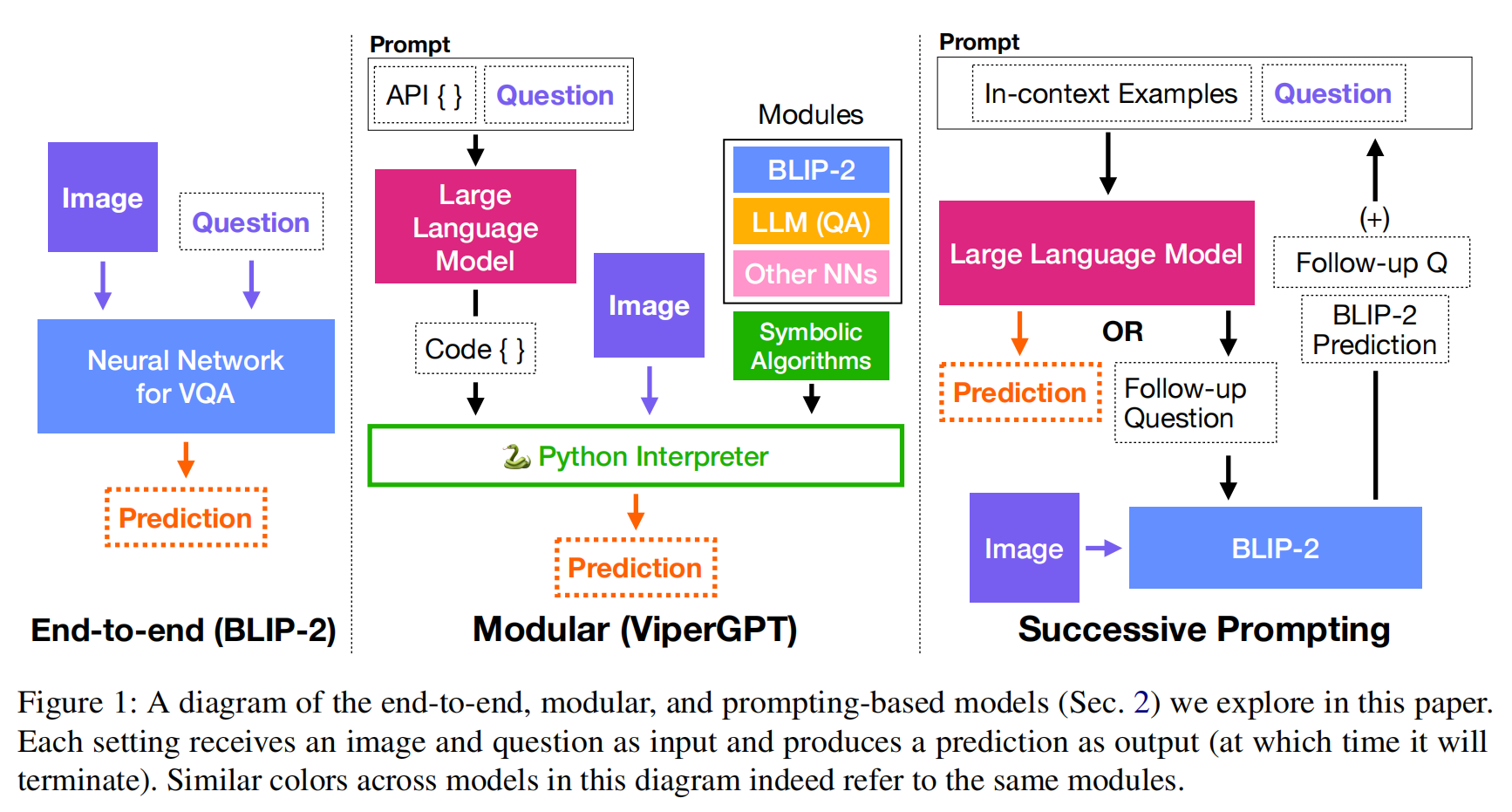
1. VQAVisual Question Answering,给出一张图片,就该图片提出任何问题?自动get到你所期望的答案。这属于Visual Reasoning 的范畴,学者们不满足于传统的图像识别、分割、Caption等工作,尝试去挖掘更高级的机器推理能力…
计算机视觉基础(13)——深度估计
前言 本节是计算机视觉的最后一节,我们将学习深度估计。从深度的概念和度量入手,依次学习单目深度估计和双目/多目深度估计,需要知道深度估计的经典方法,掌握深度估计的评价标准,注意结合对极几何进行分析和思考。 一、…